





中国和日本研究人员共同开发3D打印软机器人手指
来自浙江工业大学,天津大学,南京理工大学和立命馆大学的研究人员已经使用3D打印创建了柔软的机器人手指。由嵌入式单电极摩擦电曲率传感器(S-TECS)驱动,手指可在超低工作频率下感应弯曲曲率,而无需外部电源。该设备的生产是一种概念证明,即多材料3D打印不仅可以用于制造软致动器,而且还可以用于制造功能传感器。研究人员希望这项创新将为简单,快速的制造过程铺平道路,以生产可控的软机器人。
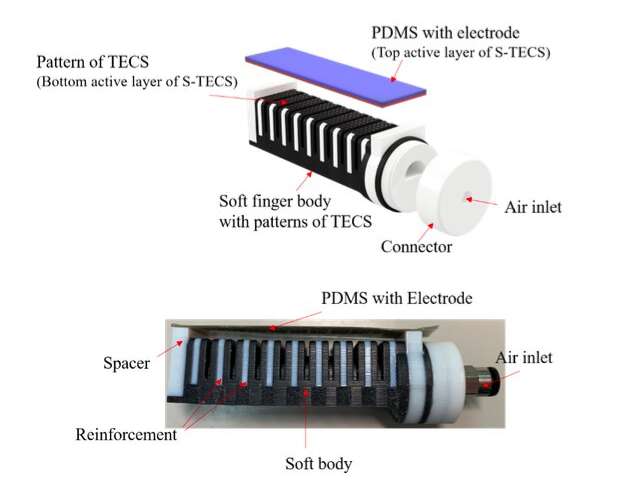
3D打印的机械手手指由九个腔室构成(如图所示)。图片来自Science Direct。
构建机械手指的独特方法
使用软材料和顺应性结构的混合物构造的机器人技术正日益为应对人口老龄化带来的挑战提供解决方案。随着软机器人研究的发展和新制造方法的发展,人机交互变得越来越安全,并为该技术开辟了新的应用。现在,例如可以直接打印具有气密性复杂结构和硬组件的软机器人。这一发展带来了创新,例如Wyss Institute于2015年生产的3D打印跳跃机器人。
其他软件机器人项目,例如Wyss团队的项目,已将基于压电,导电,磁性和有机光学材料的软件传感器集成到其软件机器人设计中。不过,据研究人员称,这些传感器可能具有诸如原型制作时间长,电缆连接不稳定,系统组装复杂以及系统集成困难等缺点。
所以研究小组选择使用摩擦电传感器。这种类型的组件提供了很高的可拉伸性和灵敏度,从而使机械手可以实时主动感知和感知其变形或响应。在该过程中使用3D打印还使团队能够使用多种材料,并利用缩短了原型制作时间的一步式打印过程。研究人员的S-TECS传感器是通过将摩擦电曲率传感器和可伸缩电极相结合而构建的,避免了与先前项目相同的集成复杂性。

S-TEC传感器如何引起接触带电的概述。图片来自Science Direct。
将S-TECS传感器集成到3D打印零件中
该设备的主体包括与主气道相连的9个充气室,每个充气室具有矩形形状,从而为要印刷的S-TECS图案提供了平坦的表面。硬增强腔室的宽度为2 mm,两端具有两个垫片,以支撑S-TECS的顶层,并在两层之间保持3 mm的高度。附加手指只能根据其腔室配置在一个方向上弯曲。当手指弯曲时,S-TECS的顶层开始接近底层,直到完全接触,激活触点带电并发电。
该设备是使用Stratasys多材料Objet350 3D打印机分两个部分生产的:增强的软主体和连接器。 S-TECS的图案直接印刷在手指主体的顶面上,以简化整个制造过程,并减少生产时间。使用摩擦状的AgilusBlack印刷材料生产该装置的摩擦电层和柔软体,因为它的拉伸强度为2.75 MPa,断裂伸长率为250%。固化在室温下进行24小时,然后将手指的3D打印部件拧在一起,然后通过硅酮粘合剂粘贴S-TECS,组装完成。
研究人员通过改变表面结构,施加在其上的力以及自动设置的工作频率来测试传感器在不同条件下的性能。未发现将传感器与不同的软材料集成在一起会降低整个机器人系统的灵活性和适应性。此外,这些传感器被证明能够在0.06 Hz的超低工作频率下测量高达8.2 m-1的手指弯曲度。测试不仅证明了S-TECS作为自供电曲率传感器的有效性,而且证明了使用多材料3-D打印技术创建具有摩擦电层的柔软机器人结构的可行性。研究人员得出结论,该方法有可能在未来使用先进传感功能的机器人应用中使用。
增材制造和软机器人
3D打印已被用于创建软机器人,具有从航空航天工业到医学用途的广泛应用。纽约康奈尔大学的研究人员于2020年1月开发了一种3D打印的柔软机器人肌肉,该肌肉可以通过排汗来控制其内部温度。其柔软的手指状致动器可以保持水分并响应温度以使其自身冷却。
NASA的一对研究人员于2019年5月成功地使用3D打印技术生产了一个柔软的机器人致动器,这是使机器人的活动部件动画和控制的关键组件。该研究是对太空中潜在的软机器人应用的更广泛研究的一部分。
罗格斯大学-新不伦瑞克大学的研究人员于2018年5月创建了一种新型水凝胶3D打印材料,这种材料非常灵活,可以像人一样走路。该材料专为医疗行业开发,可用于将药物输送到身体的目标部位,从而降低了伤害患者的风险。
研究人员的发现在题为“具有基于多材料3D打印的自供电摩擦曲率传感器的软机器人手指”中进行了详细介绍。这项研究发表在《科学直接期刊》上,由朱明珠,谢梦影,卢玄明,冈田志马和川田贞夫合著。
(本文来源:中国3D打印网)
相关推荐
-
再生时代报道/日前,鼎龙股份发布2024年度业绩预告,公司预计2024年实现归属于上市公...
-
再生时代报道/2025年1月16日,联想至像与京东正式达成战略合作,携手开启为期三年的深...




评论交流