





瑞士研究人员开发能够生产3D雕塑的3D打印两臂机器人
通过使用加热的金属线,3D打印机器人能够从聚苯乙烯泡沫中雕刻出精美的模型,而无需与材料进行任何物理接触。该技术已经产生了一系列复杂的3D原型,这些原型具有双重弯曲的表面,而传统的直线切割很难或甚至不可能实现。
使用热线雕刻泡沫塑料本身并不是一种新的生产技术,但是,使用其他工具通常需要大量时间,精力来改进制造。此外,传统的切割方法是使用直的热线将聚苯乙烯切割成一定形状,但是这种方法仅允许基本切割,而不能生产具有复杂几何形状的模型。
为此,通常将热钢丝钳安装在铣削车间的机械上,但它们也只能产生直纹的表面。 CNC机床以类似的方式使用(尽管使用钻头代替金属丝),但是在考虑机床所施加的约束的同时,很难对生成所需表面的路径进行编程。丹麦工程师在2016年的项目中进行了相关研究,该项目使用热线切割一次扫描即可生产出双曲面。不过,根据瑞士研究人员的说法,这种方法的局限性要求切割刀片必须保持平面,并且系统需要用户输入才能解决非平凡的问题。
这家位于苏黎世的研究人员的新方法使用了名为YuMi IRB 14000的3D打印机器人,该机器人配备了两个臂以提高处理效率。每个肢体的末端都挥舞着一根不可伸展的弹性金属棒,其“手”以七个自由度移动,使其具有出色的灵活性。通过对机器人的附件进行编程以有效地协同工作,研究人员能够精确地创建3D设计。
给定目标形状后,机器人的定制软件将生成一系列轨迹,并将其中一根杆扫过工件以进行切割。优化了轨迹,以最有效的方式移动“手”,并减小了当前工件和目标形状之间的差异。与顺序路径规划工具一起使用,这可以使运动完全自动化或由用户控制。
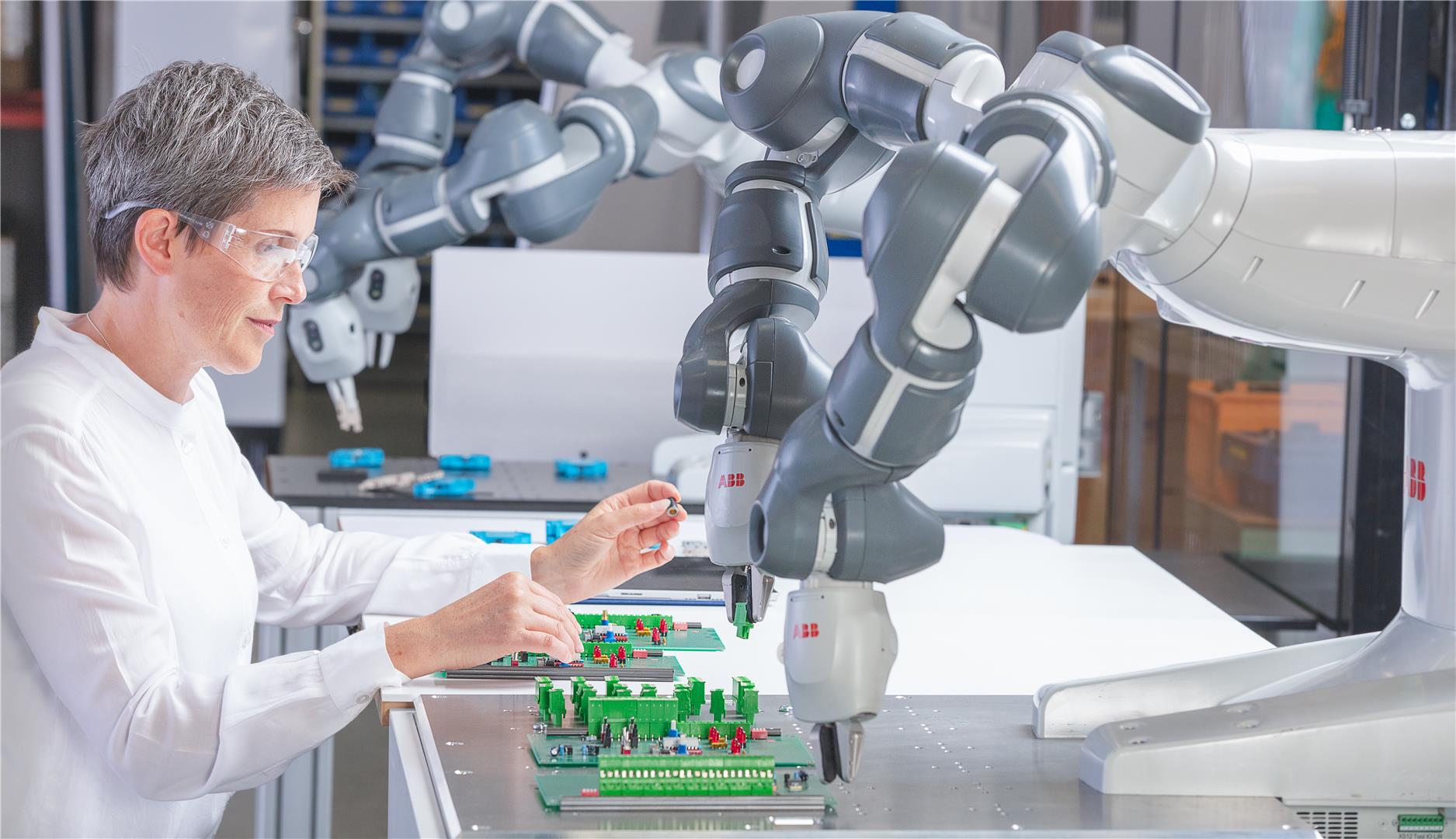
YuMi 14000能够执行许多精密任务 图片来自ABB Robotics。
使用3D打印创建机器人作品
通过创建一组多样化的仿真示例以及包括手,心,鲨鱼和蜂鸟模型在内的多个物理原型,对该方法进行了评估。在测试过程中,将一个边长为290mm的立方聚苯乙烯泡沫块安装在三脚架上,并在两次切割之间手动转动。将直径为1mm的电线连接到6.6安培和4.6伏的电源,将其加热到大约250℃。研究人员说,加热金属丝可以确保材料在接触之前就已经熔化,并产生了使用传统方法无法实现的表面。创建模型的时间因硬件和复杂性而异,因此更复杂的手动模型需要四个小时才能完成,而兔子模型仅需要两个小时零二十分钟。与相应的模拟形状相比,兔子和心脏模型的平均平均误差分别为1.97mm和0.76mm。研究人员将其归结为机器人手臂缺乏刚性,以及使用三脚架安装,这限制了其定位的准确性。
苏黎世研究人员也承认了设计的其他限制,例如用于操纵材料的杆,该杆只能弯曲并翘曲一定的量,然后才需要更换。此外,现有的用于对机器人进行编程的软件仅允许机器人的手臂进行一系列切割,而不能在一个坐姿中创建作品。尽管未经测试,但瑞士研究人员承认,尽管降低了切割质量,但升高的焊丝温度仍可能导致更高的切割速度。该技术将来也可能适用于其他材料,但是目前,该技术还处于开发的早期阶段,距离第一台毕加索机器人尚有数年之遥。
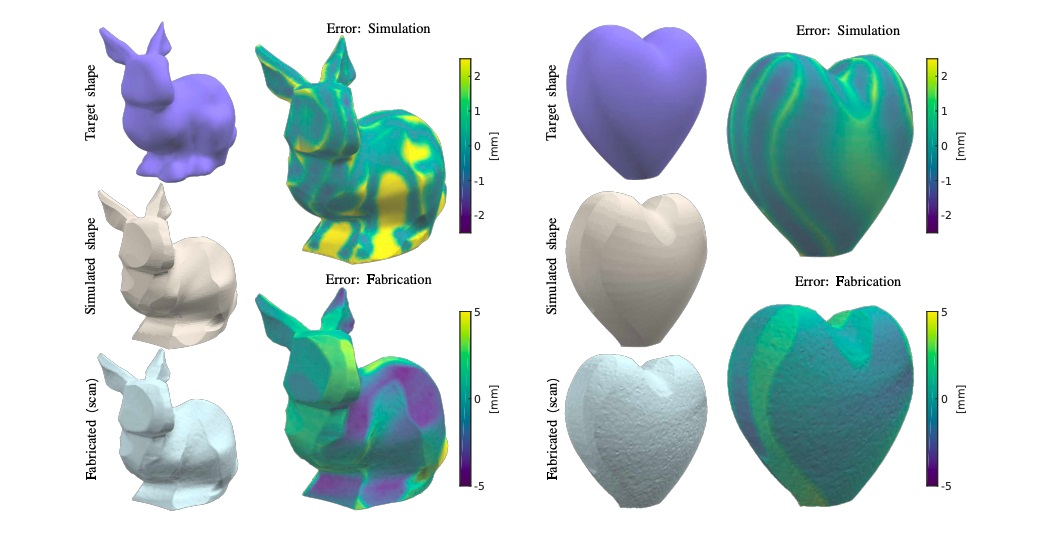
可视化表示在测试过程中产生的兔子和心脏模型中的错误率。图片来自苏黎世联邦理工学院。
使用增材制造生产的机械臂
3D打印已被用于创建多种用途的机械臂,从用于夹持工具的生物手到完整的机械人形生物。中国的深圳粤江科技有限公司于2018年在CES上首次展示了三代3D打印DOBOT机械臂。DOBOTMagician变体与五种不同的工具头兼容:3D打印机热端,激光,笔架,真空杯和夹持器。
台式机3D打印机制造商BCN3D Technologies于2016年7月发布了具有3D打印结构的开源机器人手臂。该技术是为教育目的而开发的,可以对其进行编辑,改进和更改,以适应用户的需求,同时可在成本低。
意大利技术初创公司Youbionic在2018年11月使用增材制造技术制造了增强型人形机器人。“半人马”设计是通过将公司一年前开发的手臂附件添加到机器人脊柱上而创建的。
(本文来源:中国3D打印网)
相关推荐
-
再生时代报道/近日,小猴云印杭州打印工厂正式落地投产。作为线上打印领域的佼佼者,...
-
再生时代报道/国家知识产权局信息显示,北京辰光融信技术有限公司取得一项名为“一种...





评论交流